- Easy integration into manual screwing assembly lines.
- Process-Specific Software.
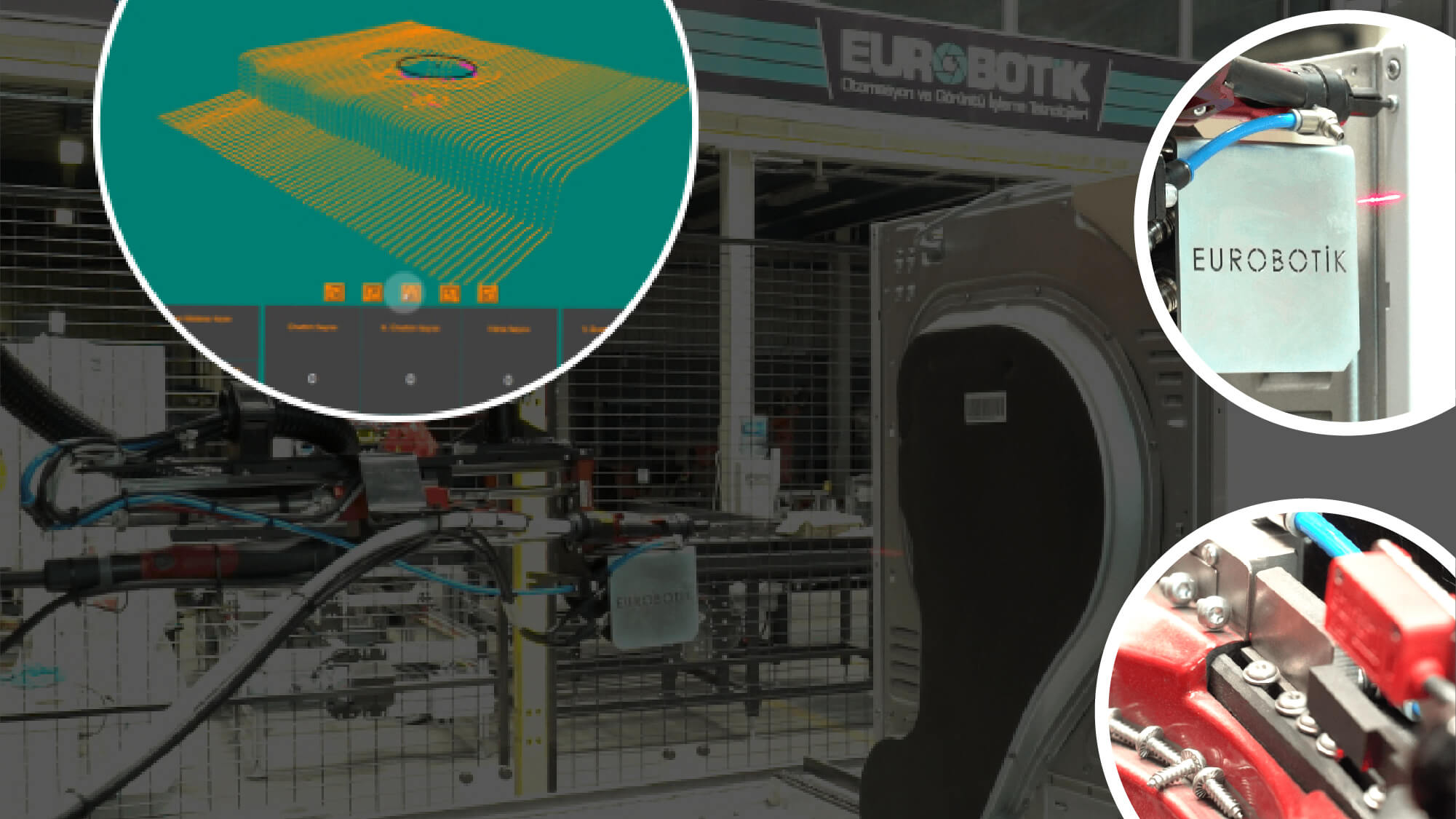
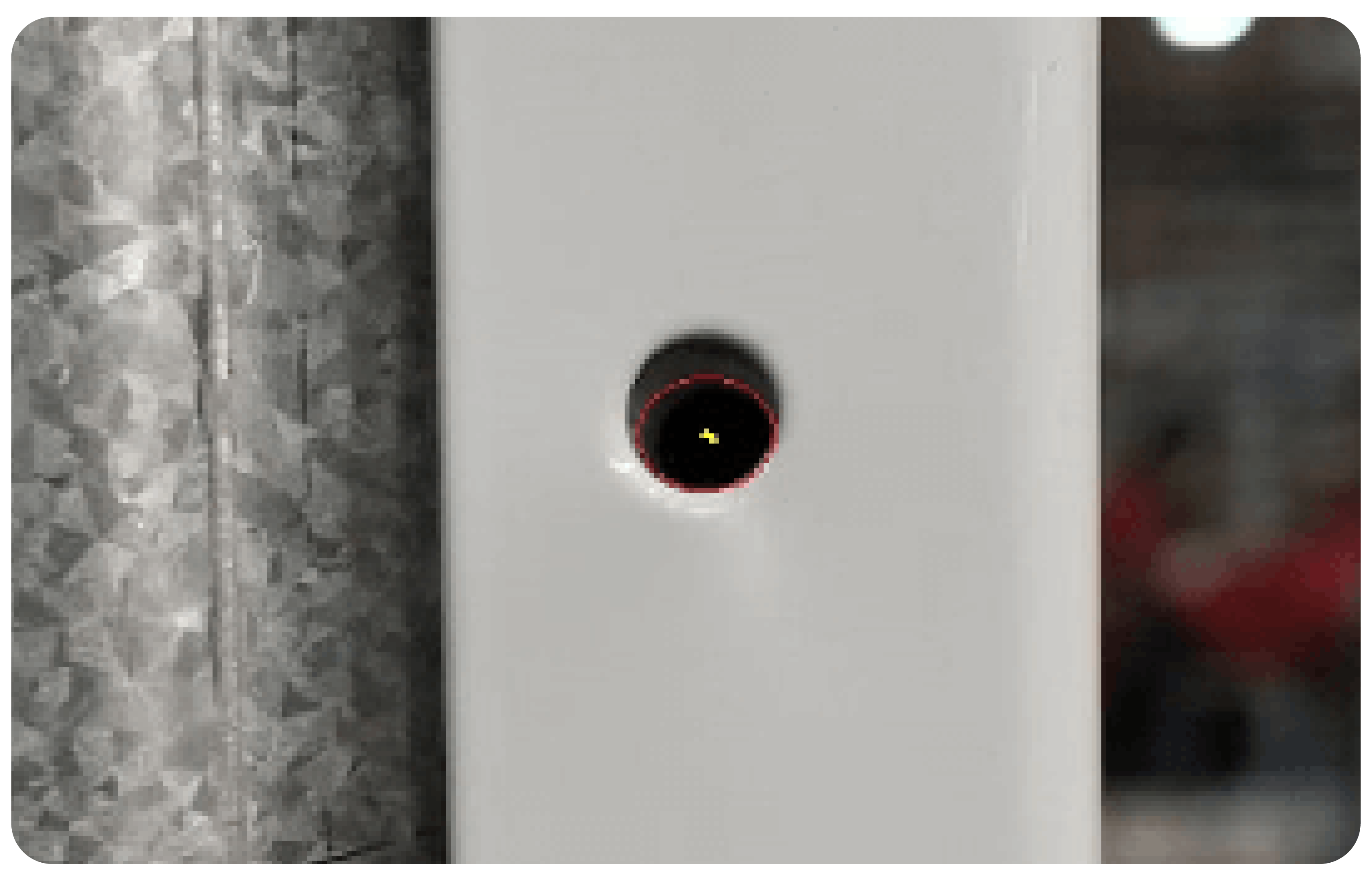
- Updating scanning points adaptively.
- Automatic Sensor Calibration.
- Refilling of the auto-feeding unit without stopping the system.
- Screwing for different colored products.
Specifications
- Scanning Area: 20mm x 20mm x 30mm.
- 3D Scanning: Calculating both translation (X,Y,Z) and Rotation (RX,RY,RZ) data.
- Scanning accuracy: Translation ( X + -0.1mm y + -0.1mm z + -0.2mm ), Rotation ( 0.1° ).
- Logging: Up to 500.000 scanning data are kept in memory.
- Cycle Time: The time per hole of scanning and robot transition movements is 2 seconds. Screwing time depends on the screw type. The average is 1 second.
Problems in Production Conditions

Status 1

Status 2
Status 3
- Eccentrically overlapping holes in production conditions.

- Machine positions in production conditions that are not ideal for robotic screwing.
Industries That Screwing System Can Use

White Goods

White Goods Components
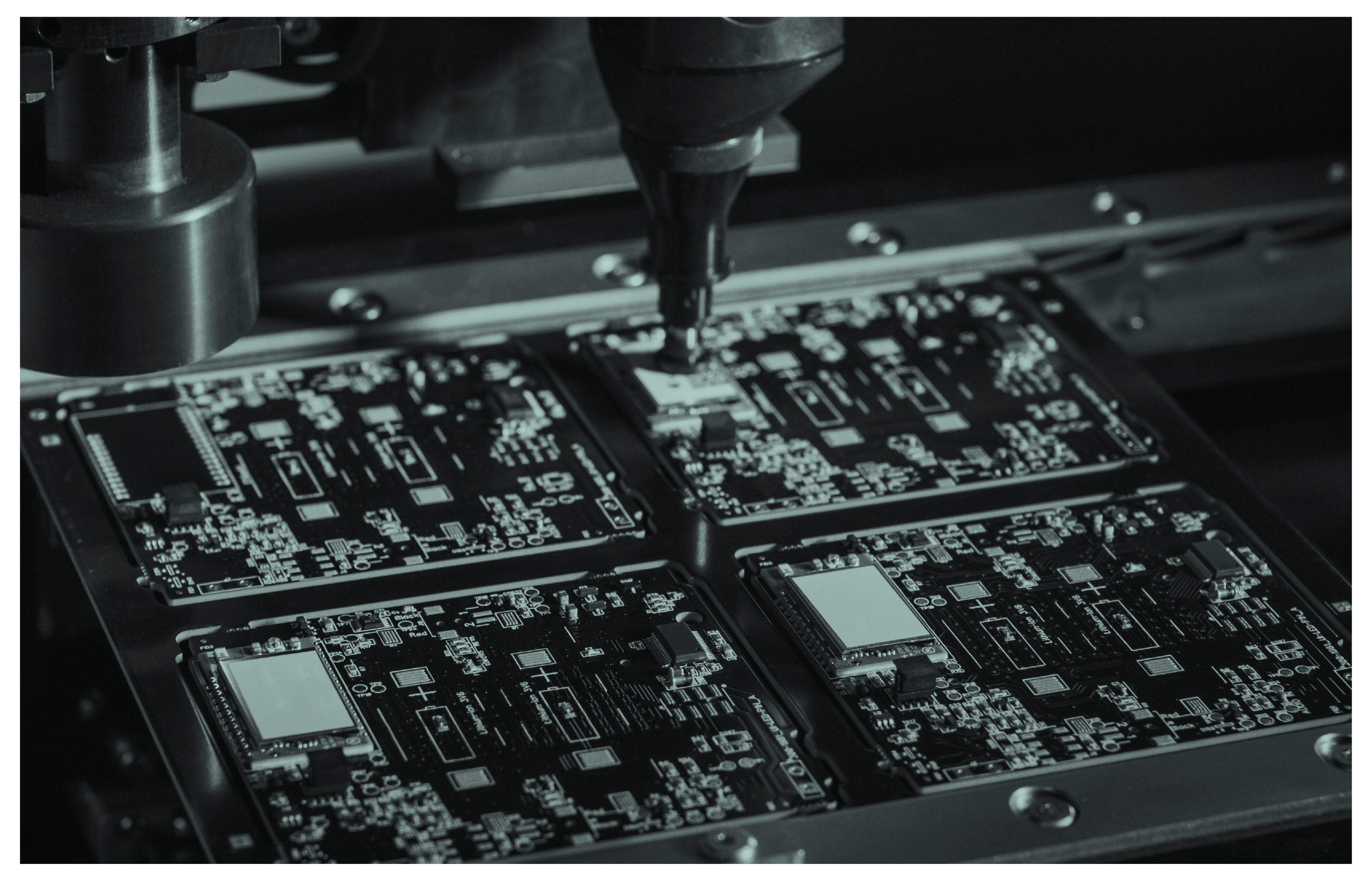
Electronics Manufacturing

Automotive
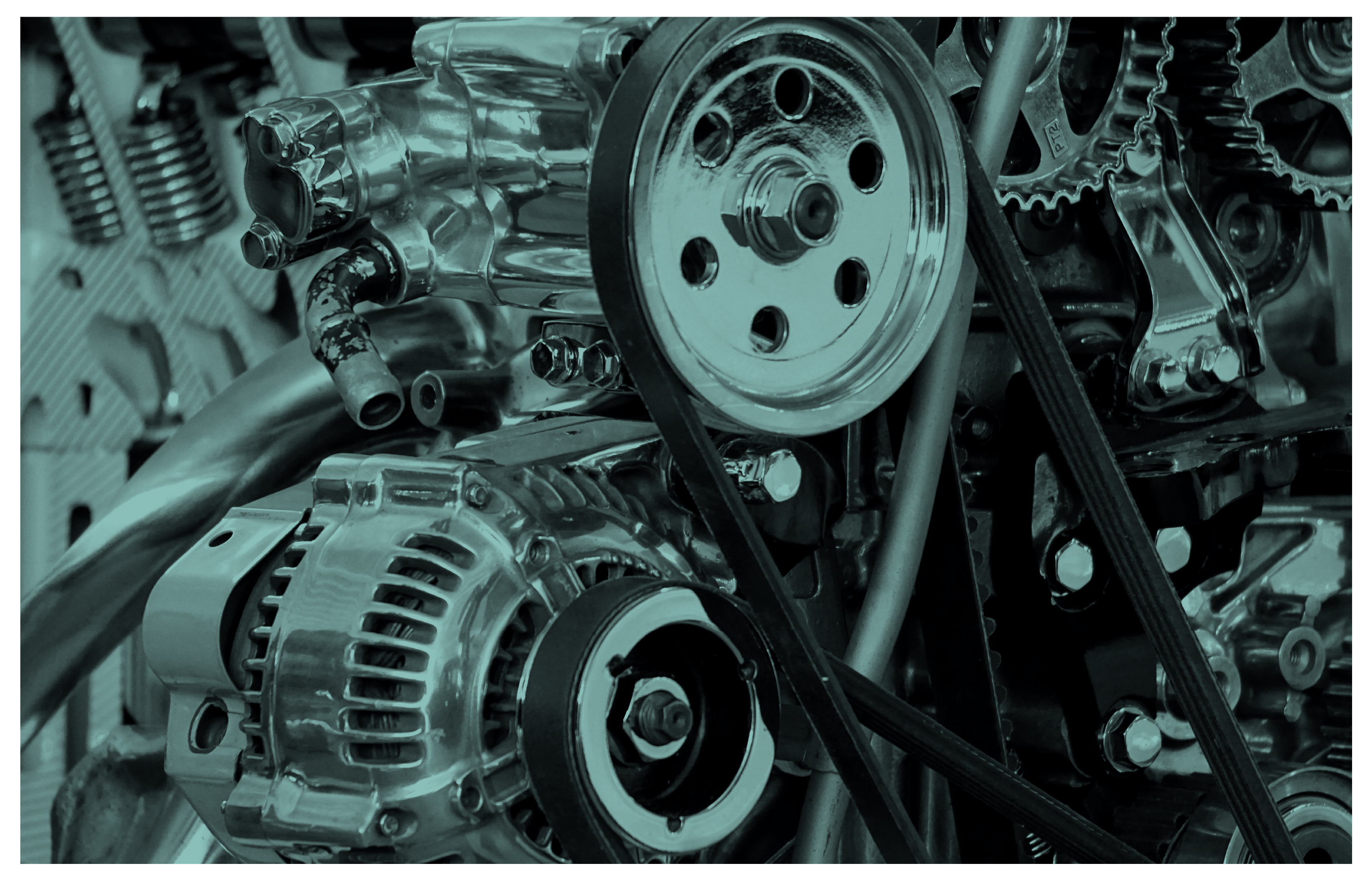
Automotive Suppliers

Plastic

Manufacturers and Suppliers

General Industry
Comparison of Screwing Systems
|
Screwing With Fixtures |
Screwing Using 2D Camera |
Screwing Using 3D Camera |
Smart Screwing |
|
|
Fixture need |
Precise fixturing required |
Partial fixturing is sufficient |
Partial fixturing is sufficient |
No fixture needed |
|
Position tolerance of the part to be screwed |
0.1 mm |
3cm in Y and Z axis 0.1mm in X axis |
3cm in X, Y and Z axis |
3cm in X, Y and Z axis |
|
Angle tolerance of the part to be screwed |
0.1° |
0.1° |
0.1° |
10° |
|
Fixture Cost |
High |
Mid |
Mid |
No Cost |
|
Camera-Sensor Cost |
__ |
€€€ |
€€€€€ |
€ |
|
The effect of light in the environment |
__ |
Special lighting and closed cell required. |
Special lighting and closed cell required. |
No need for special lighting and closed cell |
|
Position Dimensions |
__ |
XY |
XYZ |
XYZ |
|
Rotation Dimensions |
__ |
No |
No |
ABC |
|
Position Accuracy |
__ |
0.1 mm |
0.1 mm |
0.1 mm |
|
Rotation Accuracy |
__ |
No |
No |
0.1° |
|
Breakdown Response Time |
Min. 1 day |
Min. 1 day |
Min. 1 day |
Max. 4 hours |
|
Auto Calibration |
__ |
No |
No |
Yes |
|
Adaptive Scan Zone |
__ |
No |
No |
Yes |
|
Logging Scan Records |
__ |
No (in Standard Camera Software) |
No (in Standard Camera Software) |
Yes (500,000 scan records) |
|
Total Cost of Ownership |
€ |
€€€ |
€€€€ |
€€ |